


ADMA-G: INS-System mit faseroptischen Kreiseln für Fahrdynamikmessungen
Der Automotive Dynamic Motion Analyzer (ADMA) ist mehr als nur eine Inertiale Messeinheit (IMU) und wurde speziell für Fahrdynamikmessungen im Automobilbereich entwickelt. Ausgestattet mit DGNSS und faseroptischen Kreiseln, definiert dieses höstgenaue Inertiale Navigations System (INS) neue Maßstäbe für Fahrdynamikmessungen und zur ADAS-Evaluierung im Automotive-Sektor. Beschleunigung, Geschwindigkeit und Position von Fahrzeugen unter Bewegung lassen sich mit ADMA ständig und in allen drei Raumachsen bestimmen.
Des Weiteren können mit dem Inertialsystem Nick-, Wank- und Kurswinkel, sowie die Gierwinkel und Drehraten fortwährend gemessen und der Schwimmwinkel präzise bestimmt werden. Die ADMA ist speziell für anspruchsvolle Messaufgaben mit höchsten Genauigkeitsanforderungen konzipiert.
Technische Daten von ADMA-G-PRO+, ADMA-G-ECO+ und ADMA-G-ECO finden Sie in den Tabellen unten oder im Datenblatt.
Unsere Systeme unterliegen keinen US-Exportbeschränkungen und sind weltweit ohne Genehmigungsaufwand einsetzbar.
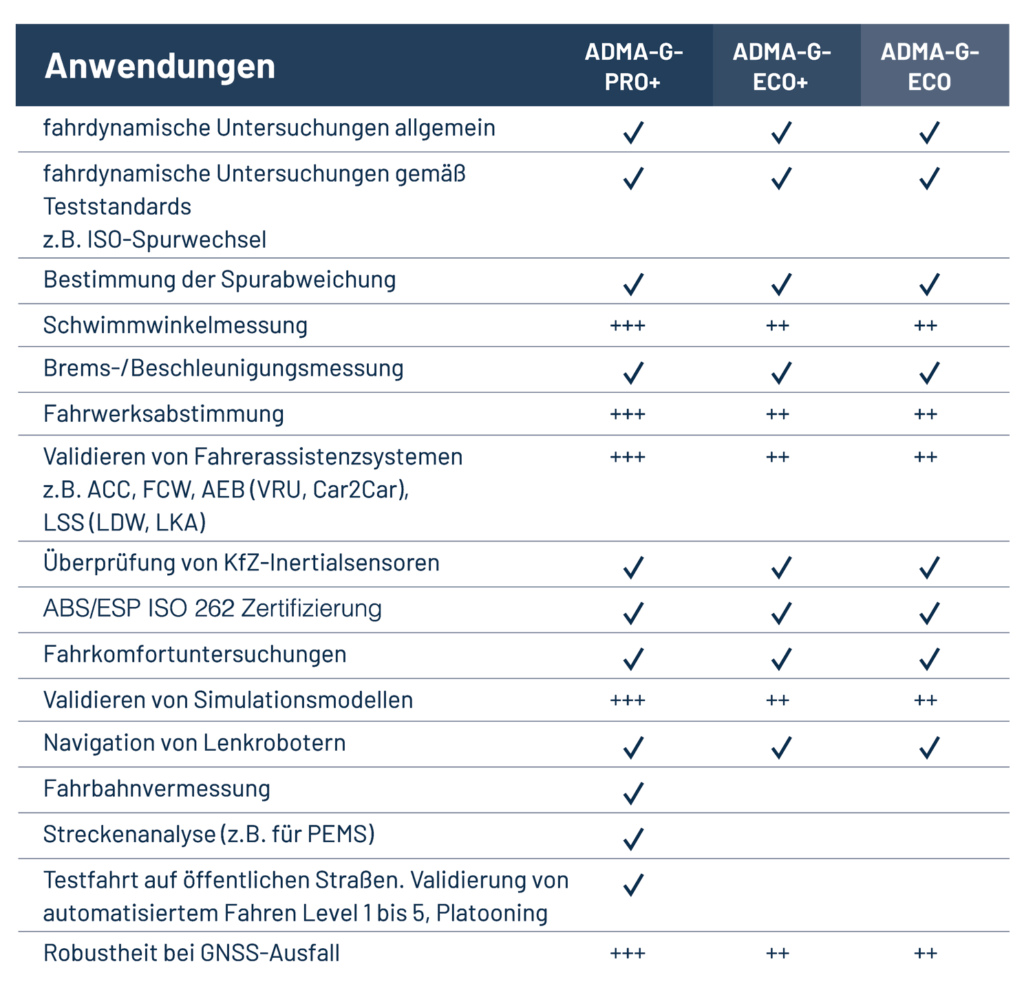
IMU-Varianten ADMA-G auf einen Blick

Einsatzgebiete der ADMA GNSS/Inertialsysteme
Die Strapdown-Technologie macht das inertiale Kreiselsystem ADMA robust und unempfindlich gegen Erschütterungen. Damit ist die ADMA ideal geeignet für fahrdynamische Untersuchungen und zur Evaluierung von Fahrerassistenzsystemen (ADAS); im Motorsport, auf dem Gebiet des fahrerlosen Fahrens (AD) sowie im Bereich Baumaschinen kommt es erfolgreich zur Anwendung. Zudem hat sich die IMU ADMA bewährt bei Streckenvermessung und bei Gleisverschleißmessungen der Bahn.
Merkmale der ADMA GNSS/Inertialsysteme
-
Messen von Fahrzeugbewegungen in drei Achsen, auch bei GNSS-Ausfall
-
Kurs- und Lagewinkelbestimmung unter Dynamik
-
Präzise Beschleunigungs- und Positionsdaten durch erweiterten Kalman-Filter
-
Genaue Positionsdaten durch internem WAAS-/EGNOS-DGNSS Empfänger (< 1 m)
-
Hochgenaue Positionsdaten (1 cm) durch internen RTK2-DGNSS-Empfänger und DGNSS-Basisstation
-
Robuste Inertialsensorik in Strapdown-Technologie ohne bewegte Teile
ADMA Highlights
-
Datenausgaberate bis 1000 Hz
-
Datenausgabe über 5 CAN-Bus- Schnittstellen und Ethernet
-
Konfiguration über Ethernet (Web-Server, ohne zusätzliche Software)
-
GNSS-Korrekturdaten-Weiterleitung und Relativdatenberechnung (z.B. Abstand) über WLAN in Echtzeit für Mehrfahrzeugbetrieb
-
GNSS-Zeitsynchrones DAQ-Synchronisationssignal, hohe Taktrate
-
Eingänge zur Erfassung analoger Signale
-
GNSS-Rohdatenausgabe über Ethernet-Schnittstelle
-
Schnittstelle für Indoor-GNSS
-
Dual-GNSS-Antennenoption
-
Mutli-GNSS fähig (GPS GLONASS GALILEO BEIDOU)
-
Datenlatenz < 1 ms
-
Kompatibel mit allen gängigen Lenk- und Fahrrobotern
IMU-Produkte für alle Ansprüche: ADMA-G Varianten
Die ADMA-Varianten unterscheiden sich in der Leistungsfähigkeit der Inertialsensoren. Daher sind alle IMU-Modelle (gilt auch für ADMA-Speed und ADMA-Slim) sind mit unterschiedlicher GNSS-Genauigkeit lieferbar: vom einfachen L1-Empfänger mit Metergenauigkeit bis zum L1/L2-RTK-Empfänger mit Zentimetergenauigkeit. Zusätzlich ist zu erwähnen, dass dass unsere Kreiselsysteme nicht ausfuhrgenehmigungspflichtig (ITAR free) sind.



Zubehör, ADMA-Optionen und Add-Ons
Unsere ADMA3 Gerätefamilie bietet Ihnen die Möglichkeit Zusatzfunktionen jederzeit, nachträglich und ohne Änderung an der Hardware durch einen Lizenz-Schlüssel zu aktivieren. Die ADMA-Optionen steigern Ihre Produktivität und bieten ein Höchstmaß an Flexibilität bei gewohnt einfacher Handhabung.
Übersicht ADMA-Optionen und Add-Ons für IMUs
-
Add-On DELTA: Relativdatenberechnung zu weiteren Fahrzeugen über WLAN in Echtzeit
-
Add-On BRAKING: Berechnung von Bremsleistungsdaten in Echtzeit
-
Add-On LATDEV: Berechnung von Spurabweichung in Echtzeit
-
Add-On FILTER: Option zur online Signalfilterung
-
Option DGNSS Korrekturdaten: Korrekturdatenempfang über Ethernet
-
Option GNSS-Raw Data: Rohdatenausgabe über Ethernet für Post-Processing
-
Option Dual-Ant: Zwei GNSS Antennen Option
-
Option 1kHz: Datenausgaberate von 500 Hz und 1 kHz über die CAN oder Ethernet-Schnittstelle
-
Option Multi-CAN: Datenausgabe über mehrere CAN-Kanäle gleichzeitig
Zubehör
Unser ADMA-Zubehör sorgt für schnelles, präzises und zuverlässiges Arbeiten.
Technische Daten
ADMA-G-PRO+
| COMPLETE SYSTEM | |
| GNSS constellations | GPS L1, L2 GLONASS L1, L2 BeiDou*1 B1, B2 Galileo*1 E1, E5 |
| Dual antenna | Optional |
| Position accuracy (1σ)*2 | 0.01 / 0.20 / 0.60 / 1.20 / 1.50 m |
| Angle Measurement range roll / pitch / yaw | 60 ° / 60 ° / ± 180 ° |
| Angle Measurement accuracy roll & pitch (1 σ) / yaw (1 σ) / sideslip (RMS) | 0.01 / 0.015 / 0.05 ° |
| Angle resolution | 0.005 ° |
| Velocity accuracy (RMS)*3 | 0.03 km/h |
| Position error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.1 / 0.6 / 2.0 m |
| Velocity error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.01 / 0.03 / 0.06 m/sec |
| Roll / Pitch angle error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | < 0.01 / 0.01 / 0.01 ° |
| Heading angle error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | < 0.01 / 0.01 / 0.01 ° |
| Braking distance accuracy without RTK2 (RMS)*3 | 0.05 m |
| Data output rate | 50 / 100 / 200 / 250 / 500 Hz / (1000 Hz)*1 |
| Calculation latency | 1 msec |
| – | |
| SENSORS – GYROS | |
| Sensor Technology | 3 closed-loop fiber optic gyros |
| Measurement range | ± 327 °/s |
| Data output resolution | 0.0001 °/s |
| Bias repeatability typ. (1 σ) | 6 °/h (0.0017 °/s), optional 1 °/h (0.00028 °/s) |
| In-run-bias typ. | 0.1 °/h |
| Noise (random walk) typ. | 0.047 °/√h |
| Scale factor | 0.05 % |
| Sensor bandwidth | 3200 Hz |
| – | |
| SENSORS – ACCELEROMETERS | |
| Sensor Technology | 3 servo accelerometers |
| Measurement range | ± 5 g / (± 10 g)*1 |
| Data output resolution | 0.0001 g |
| Bias repeatability typ. | < 1.0 mg |
| In-run-bias typ. (1 σ) | 10 µg |
| Noise (random walk) typ. | < 50 µg /√Hz |
| Scale factor (1 σ) | 0.015% |
| Sensor bandwidth | 1500 Hz |
| – | |
| INTERFACES | |
| Ethernet | 2x 1 GBit Data input/output, configuration and firmware update, driving robot data output, optional for relative data calculation and DGNSS routing. 1x 100 MBit GNSS Receiver; GNSS firmware update |
| CAN | 1x CAN, 5x CAN*1 , 2b, 1 Mbit Data output, input*1 |
| Serial | 1x RS232 GNSS Receiver; DGNSS correction data input 1x RS232 GNSS Receiver; GPGGA Log output, IPS (Indoor Positioning System) |
| Digital/Analog Input | 4x Digital / Analog (16 bit) e.g. Frequency, Brake trigger, … 1x Digital / Analog (16 bit) external velocity X |
| Digital Output | 4x Digital TTL e.g. PPS, Frequency, PPD Pulse per distance, … |
| Connector type | Lemo |
| GNSS | 2x TNC GNSS Antenna connectors |
| – | |
| HARDWARE/MISCELLANEOUS | |
| Ordering Variants | – |
| Internal Memory | up to 64 GB |
| Power supply | 9 to 32 VDC typ. 30 W |
| Dimensions (W x L x H) | 110 x 170 x 197 mm |
| Weight | 3.6 kg |
| Operating temperature | -20 to +60 °C |
| Protection class*⁴ | IP 65 |
*2 Depending on GNSS conditions, correction data and license model
*3 Typical values according to internal test standards with settled Kalman filter.
*4 The housing is protected against dust and water jets in accordance with IP65. Please note that not all plug connections and
cables are fully sealed in accordance with the IP standard. The cable is therefore not intended for use in permanently wet or damp
environments
ADMA-G-ECO+
| COMPLETE SYSTEM | |
| GNSS constellations | GPS L1, L2 GLONASS L1, L2 BeiDou*1 B1, B2 Galileo*1 E1, E5 |
| Dual antenna | Optional |
| Position accuracy (1σ)*2 | 0.01 / 0.20 / 0.60 / 1.20 / 1.50 m |
| Angle Measurement range roll / pitch / yaw | 60 ° / 60 ° / ± 180 ° |
| Angle Measurement accuracy roll & pitch (1 σ) / yaw (1 σ) / sideslip (RMS) | 0.01 / 0.025 / 0.1 ° |
| Angle resolution | 0.005 ° |
| Velocity accuracy (RMS)*3 | 0.03 km/h |
| Position error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.2 / 1.0 / 5.0 m |
| Velocity error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.02 / 0.10 / 0.20 m/sec |
| Roll / Pitch angle error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.01 / 0.02 / 0.03 ° |
| Heading angle error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.02 / 0.07 / 0.15 ° |
| Braking distance accuracy without RTK2 (RMS)*3 | 0.05 m |
| Data output rate | 50 / 100 / 200 / 250 / 500 Hz / (1000 Hz)*1 |
| Calculation latency | 1 msec |
| – | |
| SENSORS – GYROS | |
| Sensor Technology | 3 open-loop fiber optic gyros |
| Measurement range | ± 200 °/s |
| Data output resolution | 0.0001 °/s |
| Bias repeatability typ. (1 σ) | 24 °/h (0.0066 °/s) |
| In-run-bias typ. | 1 °/h |
| Noise (random walk) typ. | 0.02 °/√h |
| Scale factor | 0.1 % |
| Sensor bandwidth | 1000 Hz |
| – | |
| SENSORS – ACCELEROMETERS | |
| Sensor Technology | 3 servo accelerometers |
| Measurement range | ± 5 g / (± 10 g)*1 |
| Data output resolution | 0.0001 g |
| Bias repeatability typ. | < 1.0 mg |
| In-run-bias typ. (1 σ) | 10 µg |
| Noise (random walk) typ. | < 50 µg /√Hz |
| Scale factor (1 σ) | 0.015% |
| Sensor bandwidth | 1500 Hz |
| – | |
| INTERFACES | |
| Ethernet | 2x 1 GBit Data input/output, configuration and firmware update, driving robot data output, optional for relative data calculation and DGNSS routing. 1x 100 MBit GNSS Receiver; GNSS firmware update |
| CAN | 1x CAN, 5x CAN*1 , 2b, 1 Mbit Data output, input*1 |
| Serial | 1x RS232 GNSS Receiver; DGNSS correction data input 1x RS232 GNSS Receiver; GPGGA Log output, IPS (Indoor Positioning System) |
| Digital/Analog Input | 4x Digital / Analog (16 bit) e.g. Frequency, Brake trigger, … 1x Digital / Analog (16 bit) external velocity X |
| Digital Output | 4x Digital TTL e.g. PPS, Frequency, PPD Pulse per distance, … |
| Connector type | Lemo |
| GNSS | 2x TNC GNSS Antenna connectors |
| – | |
| HARDWARE/MISCELLANEOUS | |
| Ordering Variants | – |
| Internal Memory | up to 64 GB |
| Power supply | 9 to 32 VDC typ. 30 W |
| Dimensions (W x L x H) | 110 x 170 x 197 mm |
| Weight | 3.6 kg |
| Operating temperature | -20 to +55 °C |
| Protection class*⁴ | IP 65 |
*2 Depending on GNSS conditions, correction data and license model
*3 Typical values according to internal test standards with settled Kalman filter.
*4 The housing is protected against dust and water jets in accordance with IP65. Please note that not all plug connections and
cables are fully sealed in accordance with the IP standard. The cable is therefore not intended for use in permanently wet or damp
environments.
ADMA-G-ECO
| COMPLETE SYSTEM | |
| GNSS constellations | GPS L1, L2 GLONASS L1, L2 BeiDou*1 B1, B2 Galileo*1 E1, E5 |
| Dual antenna | Optional |
| Position accuracy (1σ)*2 | 0.01 / 0.20 / 0.60 / 1.20 / 1.50 m |
| Angle Measurement range roll / pitch / yaw | 60 ° / 60 ° / ± 180 ° |
| Angle Measurement accuracy roll & pitch (1 σ) / yaw (1 σ) / sideslip (RMS) | 0.015 / 0.025 / 0.1 ° |
| Angle resolution | 0.005 ° |
| Velocity accuracy (RMS)*3 | 0.04 km/h |
| Position error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.3 / 2.0 / 10.0 m |
| Velocity error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.04 / 0.15 / 0.35 m/sec |
| Roll / Pitch angle error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.02 / 0.03 / 0.05 ° |
| Heading angle error after 10 / 30 / 60 sec GNSS outage (RMS)*3 | 0.03 / 0.10 / 0.20 ° |
| Braking distance accuracy without RTK2 (RMS)*3 | 0.05 m |
| Data output rate | 50 / 100 / 200 / 250 / 500 Hz / (1000 Hz)*1 |
| Calculation latency | 1 msec |
| – | |
| SENSORS – GYROS | |
| Sensor Technology | 3 open-loop fiber optic gyros |
| Measurement range | ± 200 °/s |
| Data output resolution | 0.0001 °/s |
| Bias repeatability typ. (1 σ) | 24 °/h (0.0066 °/s) |
| In-run-bias typ. | 1 °/h |
| Noise (random walk) typ. | 0.02 °/√h |
| Scale factor | 0.1 % |
| Sensor bandwidth | 1000 Hz |
| – | |
| SENSORS – ACCELEROMETERS | |
| Sensor Technology | 3 MEMS accelerometers |
| Measurement range | ± 2 g / (± 5 g)*1 |
| Data output resolution | 0.0001 g |
| Bias repeatability typ. | 5 mg |
| In-run-bias typ. (1 σ) | 10 µg |
| Noise (random walk) typ. | 50 µg /√Hz |
| Scale factor (1 σ) | 0.2% |
| Sensor bandwidth | 100 Hz |
| – | |
| INTERFACES | |
| Ethernet | 2x 1 GBit Data input/output, configuration and firmware update, driving robot data output, optional for relative data calculation and DGNSS routing. 1x 100 MBit GNSS Receiver; GNSS firmware update |
| CAN | 1x CAN, 5x CAN*1, 2b, 1 Mbit Data output, input*1 |
| Serial | 1x RS232 GNSS Receiver; DGNSS correction data input 1x RS232 GNSS Receiver; GPGGA Log output, IPS (Indoor Positioning System) |
| Digital/Analog Input | 4x Digital / Analog (16 bit) e.g. Frequency, Brake trigger, … 1x Digital / Analog (16 bit) external velocity X |
| Digital Output | 4x Digital TTL e.g. PPS, Frequency, PPD Pulse per distance, … |
| Connector type | Lemo |
| GNSS | 2x TNC GNSS Antenna connectors |
| – | |
| HARDWARE/MISCELLANEOUS | |
| Ordering Variants | – |
| Internal Memory | up to 64 GB |
| Power supply | 9 to 32 VDC typ. 30 W |
| Dimensions (W x L x H) | 110 x 170 x 197 mm |
| Weight | 3.6 kg |
| Operating temperature | -20 to +55 °C |
| Protection class*⁴ | IP 65 |
*2 Depending on GNSS conditions, correction data and license model
*3 Typical values according to internal test standards with settled Kalman filter.
*4 The housing is protected against dust and water jets in accordance with IP65. Please note that not all plug connections and
cables are fully sealed in accordance with the IP standard. The cable is therefore not intended for use in permanently wet or damp
environments.