

Post-Processing Software
The post-processing software ADMA-PP merges ADMA inertial data, GNSS data and external additional information offline. Using this method, calculations can be made that are not possible in real-time operation. Post-processing ensures data integrity and considerably increases accuracy. A further advantage: RTK correction data can be applied without interruptions. With the help of the functional enhancement Moving Base, a 1 cm (1 σ) relative distance calculation between several vehicles is possible without RTK.
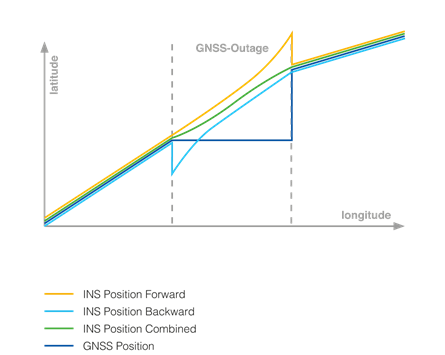
The ADMA (Automotive Dynamic Motion Analyzer), a high-precision Inertial Measurement Unit (IMU) with DGNSS, is used to validate driver assistance systems (ADAS) and to perform surveys on public roads. The increase in the variety of vehicles and the rising demands on driver assistance systems and autonomous driving lead to ever higher development requirements. As a result, post-processing is playing an increasingly important role in the automotive industry. The accuracy of the ADMA system is limited by the quality of the IMU and the duration of a GNSS outage. The performance of the system can be greatly improved through post-processing. In this way, ADMA-PP further reduces the position solution drift during GNSS outages and provides a step-free solution. To achieve this, the ADMA-PP calculates the input data in the time domain forward and backward and combines both results.
Operating principle
The ADMA-PP completely maps the function of the Kalman filter and the GNSS receiver in one software solution. With the ADMAnet and GNSS raw data of a test drive, the algorithms for the calculation of the system states can be repeated afterwards. This enables a high degree of flexibility as well as the option to calculate data in the time domain forward and backward with subsequent combination of the individual solutions.
Advantages
The ADMAnet and GNSS data are acquired via Ethernet during the test drive. An ADMA-PP project wizard enables fast and productive processing. The greatest benefit of ADMA-PP is signal optimization. Because of the complex calculation algorithm, the position accuracy can be significantly improved by combining the navigation solution forward and backward. Another advantage is the compensation of position steps after GNSS reentry (e.g. after passing through a tunnel). A further advantage is the offline RTK2 calculation. So-called RINEX data can be procured from correction data service providers.
The ADMA-PP can improve the position accuracy to 1 cm (1 sigma), even after a test drive. This means that the NTRIP or radio modem can be omitted in the test setup – but most importantly there are no RTK failures during post-processing due to the mobile radio network. Subsequent modification of the ADMA configuration is also possible. Errors in the ADMA configuration can ruin the results of a test drive. With the ADMA-PP, all parameters can be adjusted afterwards. In addition to the advantages already mentioned above, initialization is now partially obsolete. The initialization drive to set up the Kalman filter is particularly difficult on public roads. A logic integrated into the ADMA-PP makes this positioning obsolete. It also ensures that functional enhancements such as Moving Base and DELTA are possible with the help of ADMA-PP.
DELTA multi
This functional enhancement allows a distance calculation of any number of objects with a relative position accuracy of 1 cm (1 sigma). Moreover, a highly accurate, absolute position solution 1 cm (1 sigma) of all objects is available. This requires previously recorded ADMA measurement data (ADMAnet) with online RTK correction data from each object.

Moving Base
For applications on public roads in particular, the use of online RTK2 correction data via NTRIP in real-time can be expensive, unreliable, or even impossible. In this case, the use of a fixed base station is also unsuitable. The Moving Base function allows a distance calculation in post-processing between two or more vehicles with a relative position accuracy of 1 cm (1 sigma), without the need of online or offline RTK correction data. This requires previously recorded ADMA measurement data (ADMAnet) and GNSS raw data of each object. The accuracy is achieved by combining the pseudorange, carrier phase and doppler measurements of the hunter and target ADMA. Post-processing requires only an ADMA raw-data log.
A further advantage of both functional enhancements is that post-processing does not require a radio link between the participants. This saves setup effort, time, and in addition there are no data losses due to connection breakdowns.